

机器人超声波焊接机
产品参数:
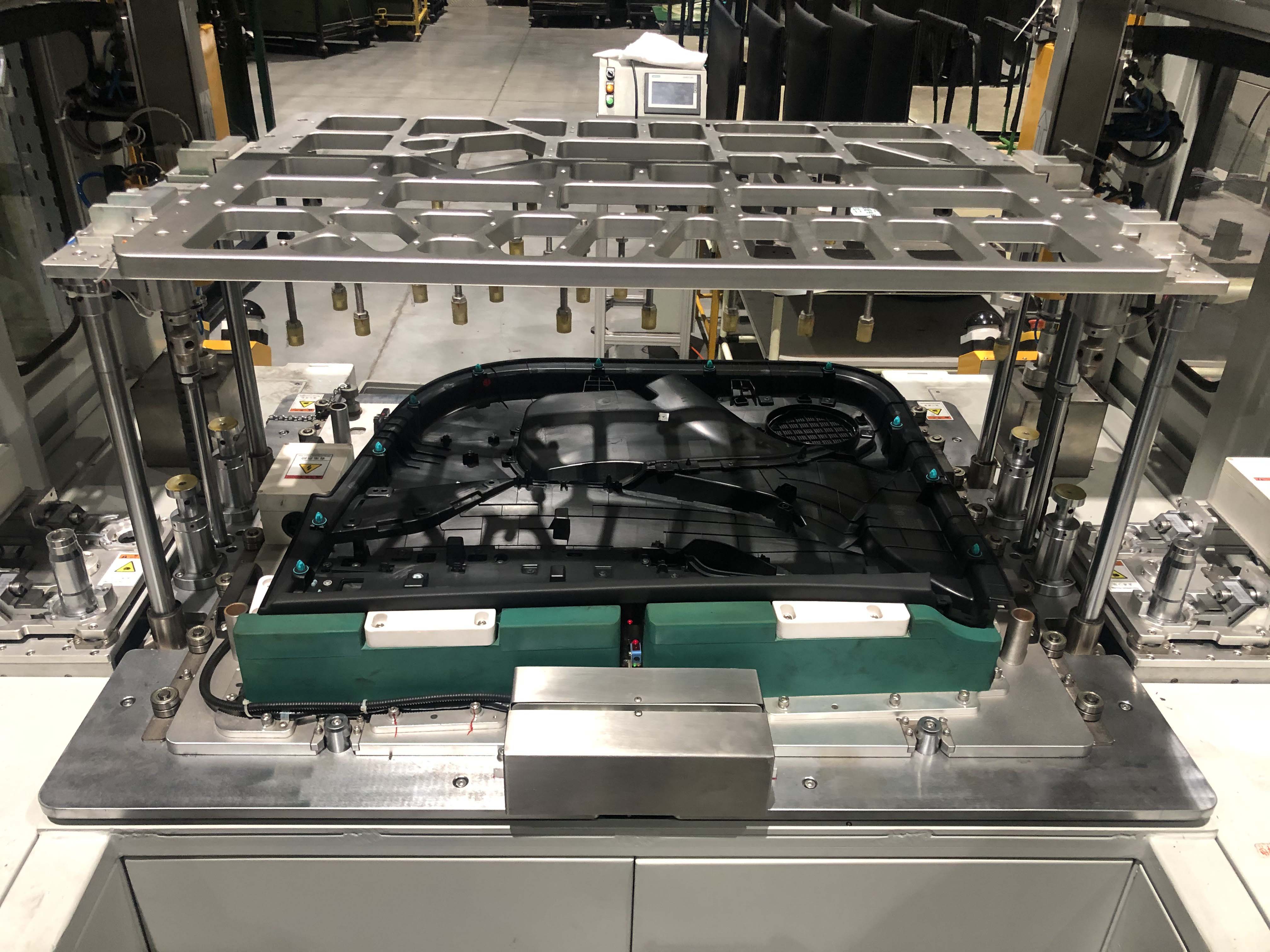
汽车隔音棉机器人超声波焊接机是采用2台6轴机器人为驱动单元,实现各个焊接点位的焊接动作。设备配有2套超声波焊接系统,稳定的能量输出,可以对不同产品的隔音棉进行焊接,焊接模具是根据客户的焊接要求所设计,确保焊接的一致性和焊接强度。机器人焊接方式的优点是只需更换产品胎模,焊接程序可以快速设定,就可以实现不同产品的焊接
采用机器人进行超声波焊接,光有一台机器人是不够的,还必须配备外围设备。常规的弧焊机器人系统由以5部分组成。
1、机器人本体,一般是伺服电机
汽车隔音棉机器人超声波焊接机是采用2台6轴机器人为驱动单元,实现各个焊接点位的焊接动作。设备配有2套超声波焊接系统,稳定的能量输出,可以对不同产品的隔音棉进行焊接,焊接模具是根据客户的焊接要求所设计,确保焊接的一致性和焊接强度。机器人焊接方式的优点是只需更换产品胎模,焊接程序可以快速设定,就可以实现不同产品的焊接
采用机器人进行超声波焊接,光有一台机器人是不够的,还必须配备外围设备。常规的弧焊机器人系统由以5部分组成。
1、机器人本体,一般是伺服电机驱动的6轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。它的任务是精确地保证机械手末端(悍枪)所要求的位置、姿态和运动轨迹。
2、机器人控制柜,它是机器人系统的神经中枢,包括计算机硬件、软件和一些专用电路,负责处理机器人工作过程中的 部信息和控制其 部动作。
3、超声波焊接电源系统,包括超声波焊接电源、专用焊枪等。
4、超声波焊接传感器及系统安 保护设施。
5、超声波焊接工装夹具
驱动的6轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。它的任务是精确地保证机械手末端(悍枪)所要求的位置、姿态和运动轨迹。
2、机器人控制柜,它是机器人系统的神经中枢,包括计算机硬件、软件和一些专用电路,负责处理机器人工作过程中的 部信息和控制其 部动作。
3、超声波焊接电源系统,包括超声波焊接电源、专用焊枪等。
4、超声波焊接传感器及系统安 保护设施。
5、超声波焊接工装夹具